You are currently exploring the Fundamentals Library, which is designed to provide a basic overview of the topics that are covered in other longer articles. This article is a part of the Mechanics section.
Human Movement
Human movement can be defined as a complex and highly coordinated mechanical interaction within the musculoskeletal system under the control of the nervous system.
We are capable of an almost infinite variety of movements and positions. This makes the study of human motion quite complicated, and we are almost always forced to simplify it to some degree.
Human kinematics is the field of research that uses technology and mathematical algorithms. The measurement techniques are usually used in the clinical & rehabilitation setting or for animation and games. As exercise professionals and coaches, we don't require that level of precision. However, we should be aware of the basic principles in order to observe, describe and communicate with a language that is understood in the circles in which we operate.
There are many branches of science that are somehow related to human movement. One that you may have heard of is biomechanics. As the name suggests, it is the discipline that combines biology and mechanics. One of the branches of biology is human anatomy.
Kinematics
Regarding mechanics, movement analysis can be split into two directly related categories:
- Kinematics
- Kinetics
Kinematics is the study of motion, while kinetics is the explanation of motion. In kinematics of the human body we simply analyze and name motion, while in kinetics we look at the forces that interact with our body and analyze their influence.
To understand how forces affect motion in our body at a fundamental level, we must understand the general principles of how motion can be measured and described.
Why Are Kinematics Important?
In calisthenics, knowing the basic mechanical principles of movement helps in understanding the demands of the exercise, comparing exercises to each other, and communicating accurately.
It is a foundation for identifying the muscle involvement in exercises & skills, analyzing the difficulty of exercises, their resistance profiles, and strength and difficulty curves.
Most of us have heard and used terms like "range of motion", "elbow flexion" or "sagittal plane". This article presents a systematized way to classify all terms related to motion in a way that can be directly applied to calisthenics.
Type
There are generally 2 main types of motion:
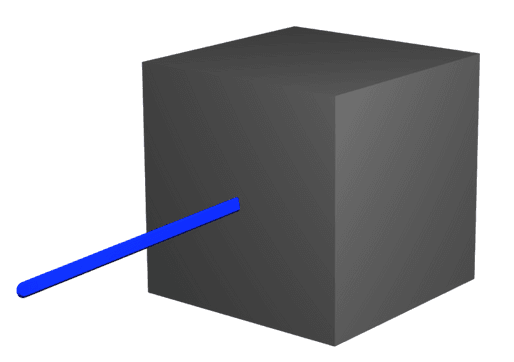
- Translatory
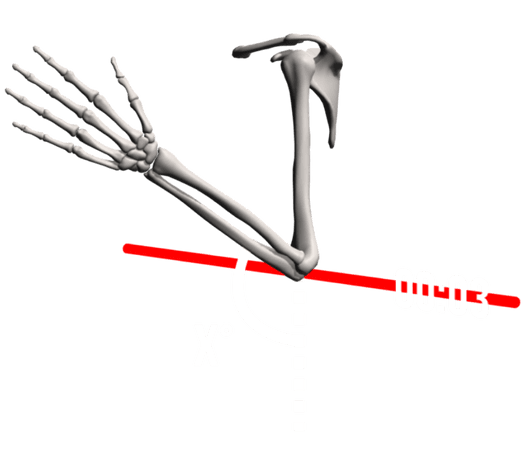
- Rotary
Translatory motion is a linear motion along an axis, while rotary motion occurs around an axis. Axis is a straight line about which an object is rotating.
We move our body thanks to the joints that connect the bones. When we look from the outside, it appears that the type of motion present in all joints is only rotation and that translation doesn't occur. This is not 100% true, because if you actually look at the structure of our joints, as the muscles pull on the bones, there is usually the component of both linear motion and rotational motion.
So the correct terminology that links translation and rotation which we technically should use is "general motion". However, when the exercise is analyzed, it is often simplified to rotation because the rotational component is usually dominant. So, with the exception of the scapulas, which move on the chest in a somewhat linear fashion, we will not include translational motion in the context of our joints for simplicity's sake.
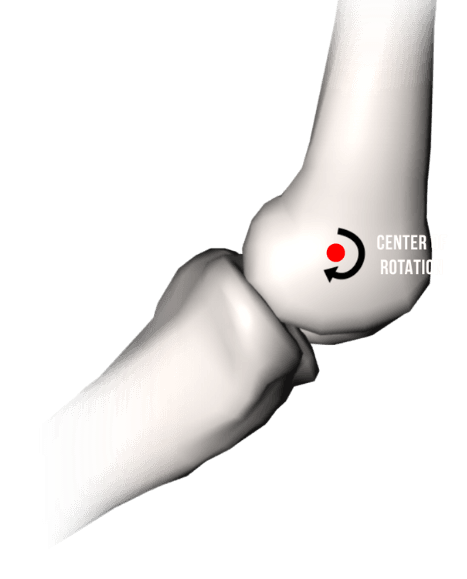
The point through which the axis passes is called "the center of rotation". Because our joints are not perfect mechanical joints, the COR will migrate during motion. However, this is another nuance that can be ignored for the sake of non-technical analysis.
Location
When it comes to the location of the displacement, we usually use the coordinate system as a frame of reference. Looking at the individual joint, the segment can rotate about the axes or move along the axes. Because we're simplifying the motion to rotation, we're thinking only about motion around the axis, and we're assuming that the axes don't change position during the motion.
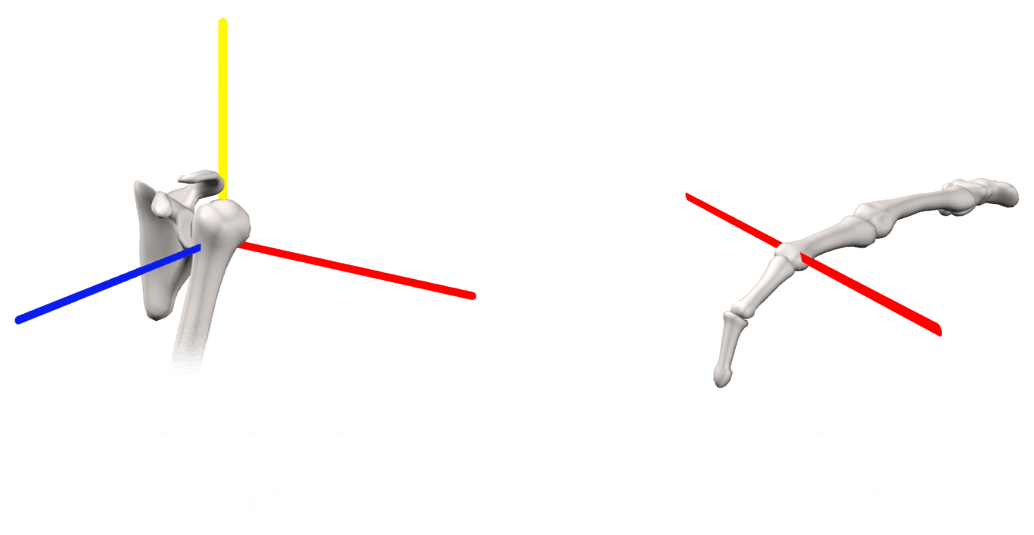
Each joint has its own coordinate system and its own degrees of freedom. Degrees of freedom basically mean how constrained the segment is when it comes to the directions it can move. A completely unconstrained object has 6 degrees of freedom. It can move around and along 3 perpendicular axes. In our joints, we have already mentioned that the movement we are mainly referring to is rotation.
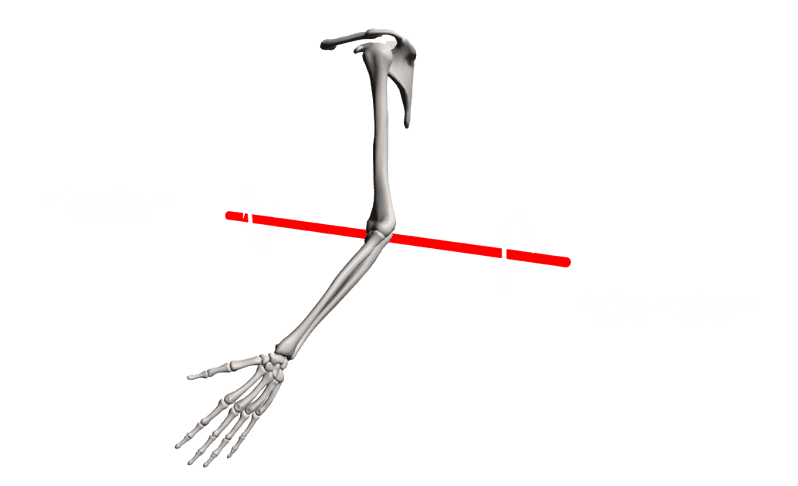
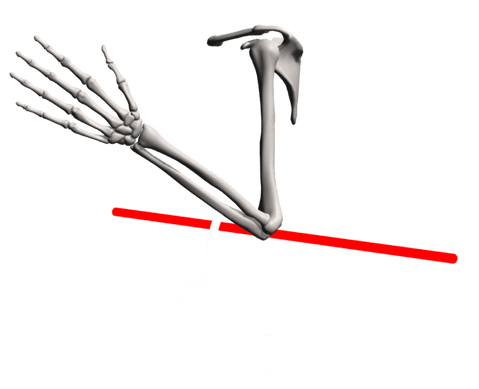
For example, in the glenohumeral joint, we say that it has 3 degrees of freedom, which means that the humerus can rotate about 3 perpendicular axes. If we look at the radiocarpal joint, which is our wrist joint, it has 2 degrees of freedom. It can move about the coronal axis and the anteroposterior axis, but it cannot rotate about the longitudinal axis.
Whenever there is more than one degree of freedom, the number of axes around which movement can occur, or planes along which movement can occur, is infinite. For example, you can move your arm around an infinite number of axes, but your finger can only move around one axis because the interphalangeal joint has only one degree of freedom.
So when we communicate the location of displacement, we are talking about the axes around which the motions occur. And these coordinate systems are generally different for each individual joint and difficult to derive outside of advanced biomechanical research. Location of motion is therefore often communicated using the conceptanatomical planes.
While this is a bit of a simplification, it is generally easier for most people to understand, and it is also very commonly used, especially in practice. So instead of going through each joint's coordinate system one by one and discussing their nuances, we can just simplify and use our whole body coordinate system and apply it to all the joints. To do this, we place our body in the anatomical position. From this point, our body can be traversed by 3 different planes, the sagittal, frontal and transverse planes. The motions of our body segments will happen along these planes.
Direction
If we have communicated the location, there are still two possible directions of that movement. For example, in the elbow joint, we can move around its axis in the sagittal plane. We can “flex” like we do in the bicep curl and “extend” like we do in tricep extension. These two motions have the same location, but the opposite direction.
In mechanics, we call these directions:
- Clockwise
- Anti-Clockwise
What is more commonly used in exercise, however, is an entire anatomical system for categorizing motion in different joints and planes, which you can read about in this article.
Magnitude
Once we have established the type, location, and direction, the next step in describing motion is to express its magnitude. In the context of joints, magnitude is usually called the range of motion. Translatory motion would be measured in centimeters, but when we deal with rotation we use angles. Angles can be measured using a goniometer or, for example, by analyzing the footage.
When we talk about range of motion, we should specify that we mean distance. The more degrees, the greater the distance. We can also use angles to describe the specific anatomical position. For each measurement, we always use the anatomical position as the starting point, and the deviation from that position is our range of motion.
For example, we can say: "20 degrees of shoulder flexion". We can also use angles to describe not a range, but a specific position that the joint is at statically. This gives us more specificity when describing a particular movement or position. For example: "performing 20 degrees of shoulder flexion while having your elbow flexed to 90 degrees".
Rate
Let's talk about the last variable, which is rate. When it comes to rate, we would normally talk about velocity and acceleration. In the context of a single joint and a single direction we are talking about angular velocity expressed in degrees per second.
We could for example state that from an anatomical position, I performed 90 degrees of shoulder flexion at a rate of 30 degrees per second. With this description, even without looking at the footage, anyone would be able to know what we mean.
Of course apart from velocity, there is also the angular acceleration, which is change of velocity in time. Angular acceleration is expressed in degrees per second squared. This gives us another layer of specificity when describing motion.